G&C algorithms play an important
role in maximizing the lethality of a guided missile system.
While G&C algorithms are diverse in type and complexity, they
all have adjustable parameters that affect their operation and,
consequently, overall missile performance. The selection, or “tuning,”
process, whereby the optimum values for the adjustable parameters
are obtained, is a critical challenge in G&C algorithm design. Analytical
techniques often are unavailable, and manual analyze-and-iterate methods are
time-consuming and suboptimal. In this article, we discuss an automated, simulationbased approach to G&C algorithm optimization that uses the simultaneous perturbation stochastic approximation (SPSA) algorithm. The practical challenges of G&C
algorithm tuning, as well as effective solutions to these challenges.
G&C algorithm parameters must be designed to operate over a wide variety of flight conditions and scenarios.
Factors such as the suite of targets, flight conditions,
and phase of missile flight (e.g., boost, midcourse, terminal) must be considered in the design process. There
may be multiple and sometimes competing performance
objectives, such as final miss distance, airframe stability,
conservation of control energy, and warhead effectiveness. When these types of performance objectives are
addressed directly in the design process, a missile simulation of sufficient fidelity to accurately calculate them
is required. Sometimes these performance measures are
difficult and costly to compute via simulations—which
often are highly nonlinear with complex, noisy inputs
and model characteristics—thus complicating the
design task.
Design Techniques
The techniques used to optimize G&C algorithm
parameters vary widely. Analytical techniques are available for some algorithms. For example, the gains in
conventional three-loop autopilots can be calculated
analytically using linear techniques that satisfy timeconstant, airframe stability, and robustness criteria.2
These gains often are valid over a limited set of flight
conditions, and independent gain sets must be generated
over a wide range of conditions and scheduled for use in
flight. Conventional guidance filter and law design techniques, on the other hand, are usually ad hoc because
few analytical design methods are available. The trialand-error design process involves manual adjustments
of the design parameters based on qualitative and
quantitative performance measures, sometimes obtained
from guided missile simulation outputs. Occasionally,
some rigor is added to the manual process by evaluating the design parameters over a range of values. For
example, one algorithm gain is parametrically stepped
through a range of values while holding all others
constant, and the value that yields the best system
performance is chosen. This process is repeated for
each design parameter. Grid-search techniques such as
this are tedious and time-consuming, and the resulting
designs are arguably suboptimal.
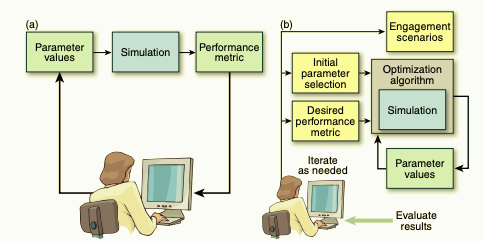
These challenges demand a more rigorous and
structured approach to G&C algorithm gain optimization. Problems of complexity and scale, the diversity of
algorithms, and the fact that simulations are increasingly being used in the design process motivate the use
of a computer to iteratively seek the optimal values.
Such simulation-based optimization techniques use
noisy simulation outputs to drive the relevant design
parameters to their optimal values. The optimization
process is automatic in that the parameters are adjusted
by a numerical minimization algorithm rather than by a
human.
Parameter Scheduling
As noted above, well-designed missile G&C algorithms should operate over a wide range of engagement scenarios. This requirement complicates the design task because the optimal algorithm parameter values rarely
remain constant over the entirety of the scenario and flight-condition space.
For instance, the engagements may occur at different speeds and altitudes,
variables that affect the maneuverability of the missile by constraining the
aerodynamic forces and moments the missile can generate. The inertial
properties of the missile also vary throughout flight. As the motor burns—
altering the mass, rotational inertia, and center of gravity—the lateral and
angular acceleration capabilities of the missile change. These changing aerodynamic and inertial properties strongly affect optimal control parameter
values. Thus, the output of an automated tuning may not be a single value
for a given parameter but rather a number of values, each of which is optimal
for a given scenario or flight condition and must be interpolated for use in
real time during flight. This process of interpolating a set of parameter values
is known as parameter scheduling and often is motivated by the use of linear
design techniques.
A good example of the need for parameter scheduling to accommodate
parameter dependence on missile and engagement properties is the autopilot time constant. Ideally, the controller should have the smallest time constant possible so that it can generate commands at the highest frequency
and amplitude to which the missile system can respond. Because the missile
system response time depends strongly on the dynamic pressure experienced
through flight, it is customary to vary controller parameters as functions of
dynamic pressure, q. Since SPSA and other automated optimization algorithms only tune a finite number of constant-valued parameters simultaneously.